PIC
PIC es el acrónimo
de Pheripetal Interface Controller (controlador de periférico de interfaz), en
un principio fue diseñado para comunicar en la tarjeta madre los periféricos
externos. Actualmente se ocupa Para la educación, diseño y desarrollo.
Existen 2 métodos
para su implementación para microcontroladores, una es con encapsulado DIP y el
Segundo es para pic’s más robustos que implementan como tarjetas de desarrollo
como el HC12 de Motorola.
Existen muchos
fabricantes de PIC’s entre ellos mencionare los mas importantes:
·
MOTOROLA (familias HC11 y HC12)
·
TEXAS INSTRUMENTS
·
MICROCHIP (PIC familias 16,18..etc)
·
ATMEL (ATmega168)
[http://www.arduino.cc/es/] Revisar
esta pagina: es importante tener en cuenta
Comúnmente los
que se tiene es una información limitada de los fabricantes lo que lleva a
depender de los fabricantes, Esto es una buena práctica para poder diseñar con información
libre.
Los más empleados
para La educación actualmente son los
antes mencionados para este blog se ocuparan microchip, no se debe perder de
vista de la existencia y facilidad para emplear las demás marcas.
Para obtener el software empleado en este blog se dan el software y forma de instalacion:

Para poder programar es necesario
el software de desarrollo, en este caso se ocuparan 2 que son muy faciles de
usar y de gran utilidad.
-PROTEUS (este programa nos ayuda a
simular sin tener que alambrar fisicamente)
-CCS (c compiler util para poder
programar en C )
-MASTER PROG (independiente) Y PICKIT
(microchip)Para poder pasar el archivo y programar el pic. [Arduino no es
necesario tener un programador se conecta directamente a la pc]
Imagen de Proteus

Imagen de CCS compiller
Imágenes de PICKIT


Imágenes de MASTERPROG


Para poder llevar a cabo un diseño se van a plantear los pasos a
seguir:
1.
Seleccionar El chip a utilizar para la aplicación
adecuada (tratar de evitar usar un chip grande para una aplicación pequeña y un
chip pequeño para una aplicación grande )
2. Programar
en c
3. Simular
en Proteus (evita tiempos perdidos en cablear y cometer errores tanto de programación
y fisicamente)
4. Construcción
física
5.
Pruebas y caracterización
2.PROGRAMACION
EN C PARA MICROCONTROLADORES
Un
compilador convierte el lenguaje de alto nivel a instrucciones en código
maquina; un cross-compiler es un compilador que funciona en un procesador
(normalmente en un PC) diferente al procesador objeto. El compilador CCS c es
un cross-compiler. Los programas son editados y compilados a instrucciones
maquina en el entorno de trabajo del PC, el código mauina puede ser cargado al
PC al sistema PIC mediante algún Programador y puede ser depurado desde el
entorno de trabajo del PC.
Para
escribir un programa C con el CCs C se debe tener en cuenta la serie de
elementos básicos de su estructura:
1.-DIRECTIVAS
DE PREPROCESADO
|
Controlan
la conversión del programa a código maquina por parte del compilador.
|
2.-PROGRAMAS
O FUNCIONES
|
Conjunto
de instrucciones. Puede haber uno o varios; en cualquier caso siempre debe
haber uno definido como programa principal mediante la inclusión de la
llamada main()
|
3.-INSTRUCCIONES
|
Indican
como se debe comportar el PIC en todo momento
|
4.-COMENTARIOS
|
Permiten
describir lo que significa cada línea del programa
|
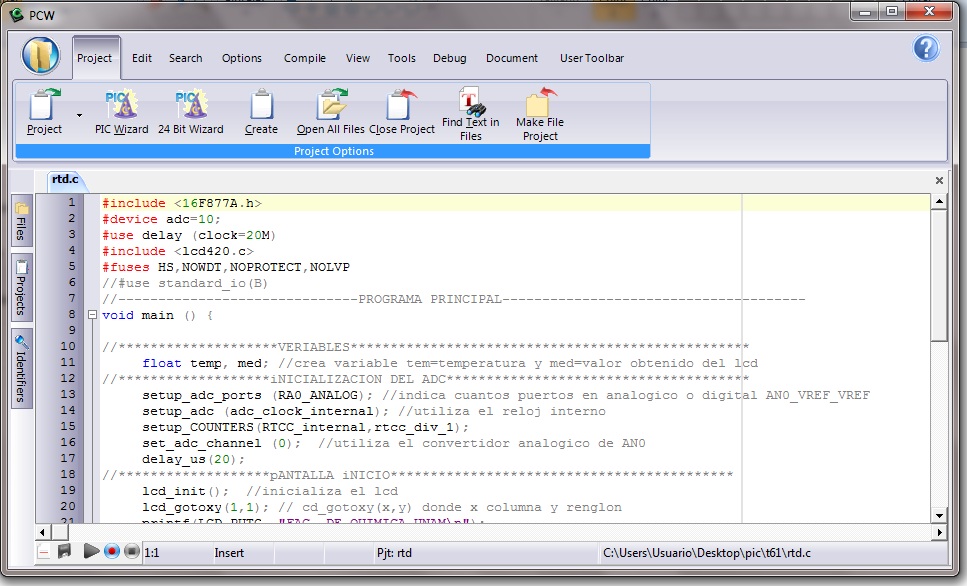
TABLA 2.1 Componentes de la estructura básica de un programa en “C” para PIC

Figura 2.1 Ejemplo de componentes de estrustura basica de un programa en "C"
TIPOS DE DATOS

Las variables se utilizan nombrar posiciones de memoria RAM;
se deben declarar, obligatoriamente, antes de utilizarlas; para ello se debe
indicar el nombre y el tipo de dato que se manejará. Se define de la siguiente
forma:
TIPO NOMBRE_VARIAVLE[=VALOR INICIAL]
Las variables definidas en un programa pueden ser de tipo
LOCAL o GLOBAL. Las variables locales sólo se utilizan en la función donde se
encuentran declaradas; las variables globales se pueden utilizar en todas las
funciones del programa. Ambas se deben declarare antes de ser utilizadas y las
globales deben declararse antes de cualquier función y fuera de ellas.
Las variables globales son puestas a cero cuando se inicia
la función principal main().
ESTRUCTURAS DE
CONTROL
